'%20fill='%23FFFFFF'%3e%3cg%20id='展开'%20transform='translate(1751.000000,%2034.000000)'%3e%3cpath%20d='M1,0%20L12,0%20C12.5522847,-1.01453063e-16%2013,0.44771525%2013,1%20C13,1.55228475%2012.5522847,2%2012,2%20L1,2%20C0.44771525,2%206.76353751e-17,1.55228475%200,1%20C-6.76353751e-17,0.44771525%200.44771525,1.01453063e-16%201,0%20Z'%20id='矩形'%3e%3c/path%3e%3cpath%20d='M1,8%20L19,8%20C19.5522847,8%2020,8.44771525%2020,9%20C20,9.55228475%2019.5522847,10%2019,10%20L1,10%20C0.44771525,10%206.76353751e-17,9.55228475%200,9%20C-6.76353751e-17,8.44771525%200.44771525,8%201,8%20Z'%20id='矩形备份-22'%3e%3c/path%3e%3cpath%20d='M1,16%20L19,16%20C19.5522847,16%2020,16.4477153%2020,17%20C20,17.5522847%2019.5522847,18%2019,18%20L1,18%20C0.44771525,18%206.76353751e-17,17.5522847%200,17%20C-6.76353751e-17,16.4477153%200.44771525,16%201,16%20Z'%20id='矩形备份-26'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
-

ISO认证
-
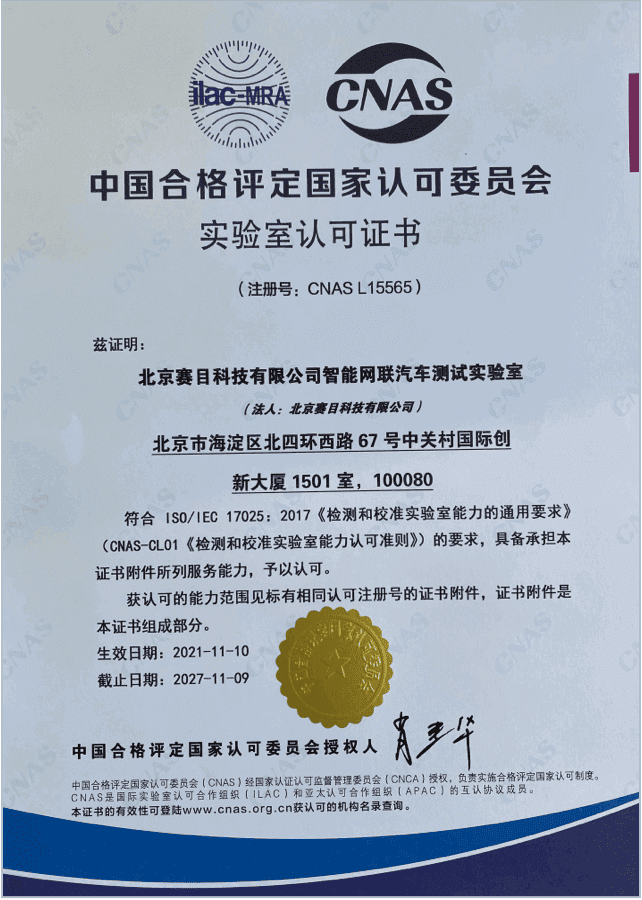
CNAS认证
-

CMA认证
-
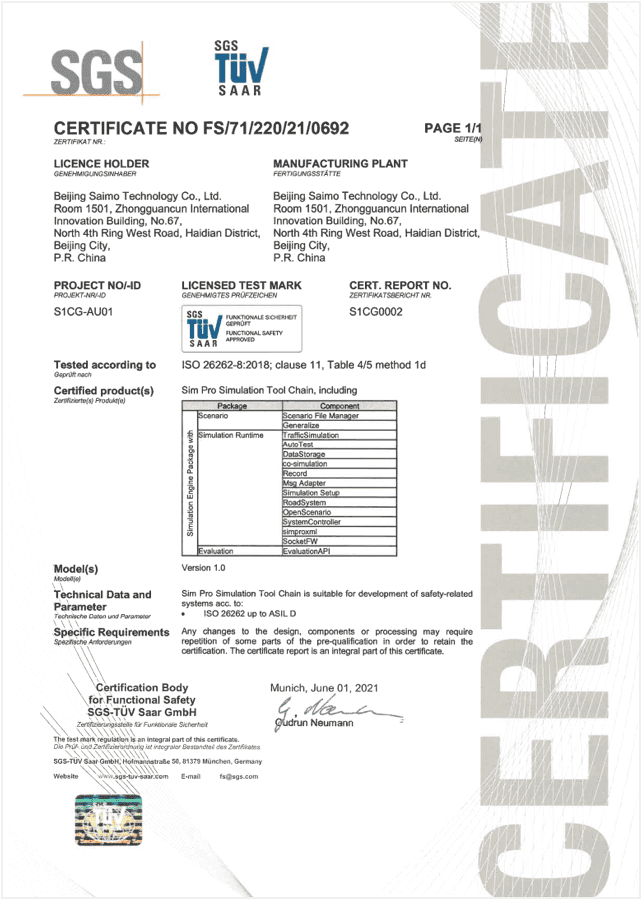
SGS认证

「国家级专精特新“小巨人”企业」

「北京市“专精特新”中小企业」

「国家级高新技术企业」

「中关村高新技术企业」

「北京市企业技术中心」
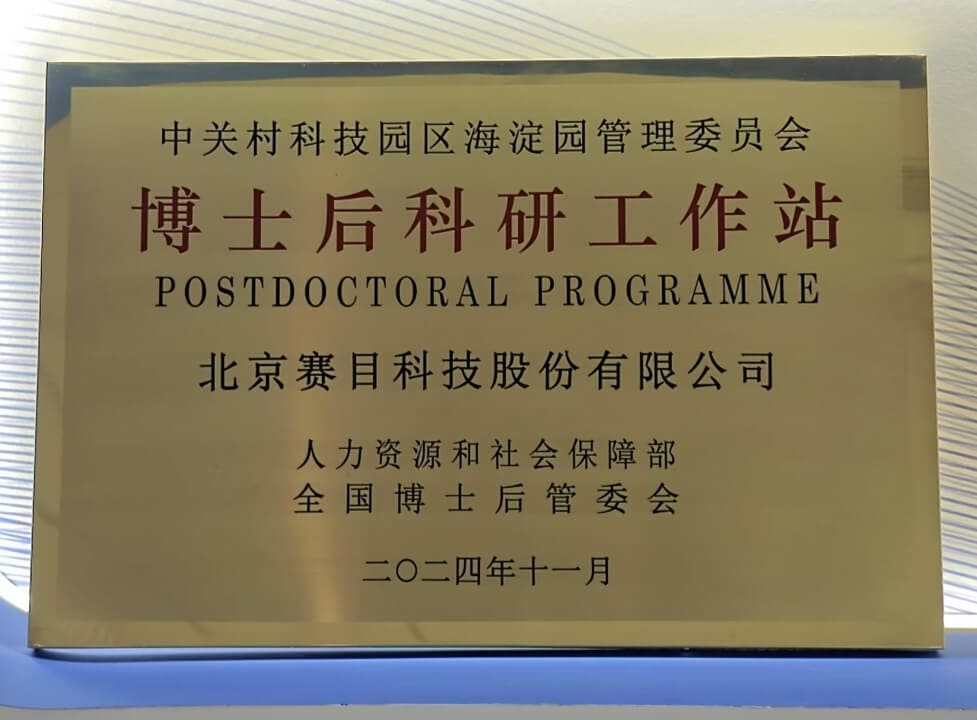
「北京市博士后科研工作站」

2025年1月15日
1月15日,赛目科技(02571.HK)正式在港交所挂牌上市,标志着这家中国工业软件领域的创新企业在资本市场和国际化发展道路上迈出关键一步。
上午9时,赛目科技股东代表——中国电子信息产业发展研究院(赛迪研究院)党委书记、副院长刘文强,以及三位联合创始人等嘉宾共同出席敲钟仪式,现场气氛热烈。
2024年4月28日
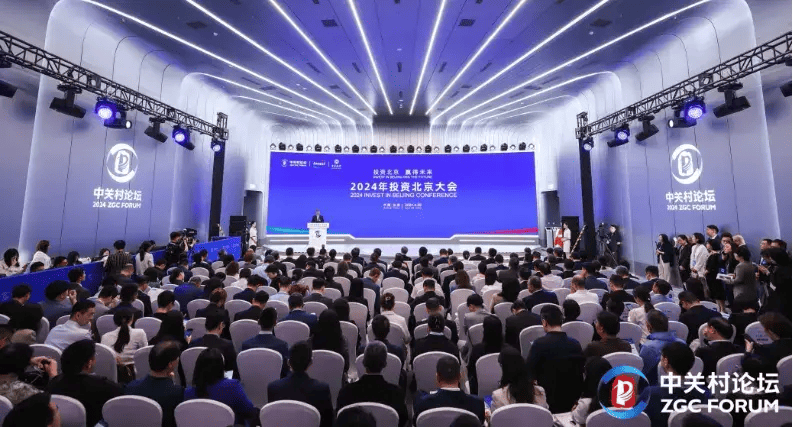
2024年4月25日,由北京市政府主办的2024年“投资北京”大会在2024年中关村论坛期间成功举办。赛目科技总经理何丰先生作为国家级专精特新“小巨人”企业代表受邀出席大会,并在企业展示环节进行精彩发言,着重介绍了公司在智能网联汽车仿真技术领域的发展特色、投资亮点以及未来战略规划,收获了与会嘉宾和投资机构的高度关注。何丰先生在演讲中强调,仿真技术的突破是中国汽车产业智能化转型升级的关键,赛目科技将始终致力于仿真技术的创新与突破。经过多年发展和积累,公司在智能网联汽车仿真技术领域已经掌握了自主可控的核心技术,构建了多元化的产品与服务组合。凭借这些优势,公司已经在行业中取得了领先地位,并获得了广泛的市场认可。展望未来公司的市场前景将更加广阔。此后,在企业投资咨询洽谈环节中,多家投资机构代表对赛目科技在智能网联汽车仿真技术领域展现出的杰出实力与深厚技术积淀给予高度评价,并纷纷表示出强烈的合作意向。对此,何丰先生积极回应并表示,公司热切期待与国内外优秀的投资机构和合作伙伴携手合作,共同推动智能网联汽车产业的创新与发展。

2023年9月22日
9月20日至24日,2023世界智能网联汽车大会在京盛大举行。北京赛目科技股份有限公司(以下简称“赛目科技”)已连续五届在这一国际盛事上展示卓越实力。本届大会上,赛目科技在多个环节精彩亮相,不仅发布了两项引领行业的创新成果,也向业界展示了自动驾驶安全验证的重要方向。
在22日上午的“全球创新成果发布秀”上,SGS全球认证经理Mark
Lohmann先生代表SGS为赛目科技颁发了Safety
Pro的ISO 26262
功能安全TCL-2级别产品认证证书。Safety
Pro开发团队负责人、高级业务总监谭哲女士代表团队上台接受这一荣誉。
Safety
Pro是赛目科技自研推出的功能安全与预期功能安全分析工具。这项认证意味着Safety
Pro在帮助汽车行业确保车辆电子系统的功能安全方面具备了高度的技术先进性和可信度,这一技术成就将使其成为行业标杆,为智能网联汽车的安全性带来新的保障。